ABB MOTOR QABP71M2A
ABB MOTOR QABP71M2B
ABB MOTOR QABP80M2A
ABB MOTOR QABP80M2B
ABB MOTOR QABP315L4A
ABB MOTOR QABP315L4B
ABB MOTOR QABP355M4A
ABB MOTOR QABP355L4A
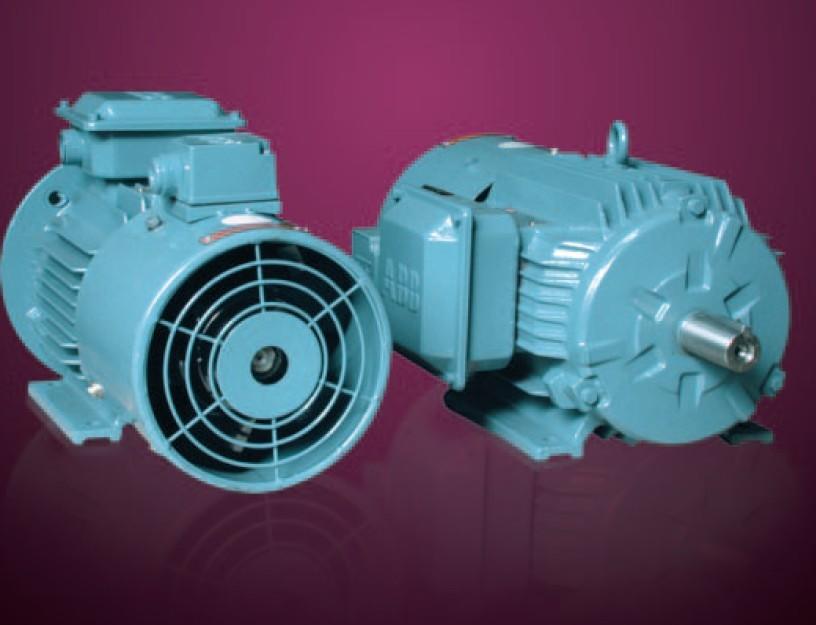
Sijil QABP: Rekabentuk motor pemacu frekuensi pembolehubah adalah munasabah, dan ia boleh dipadankan dengan penukar frekuensi yang sama di rumah dan di luar negara. Ia sangat boleh ditukar dan serba boleh. Tahap kecekapan tenaga ialah EFF2 / IE3
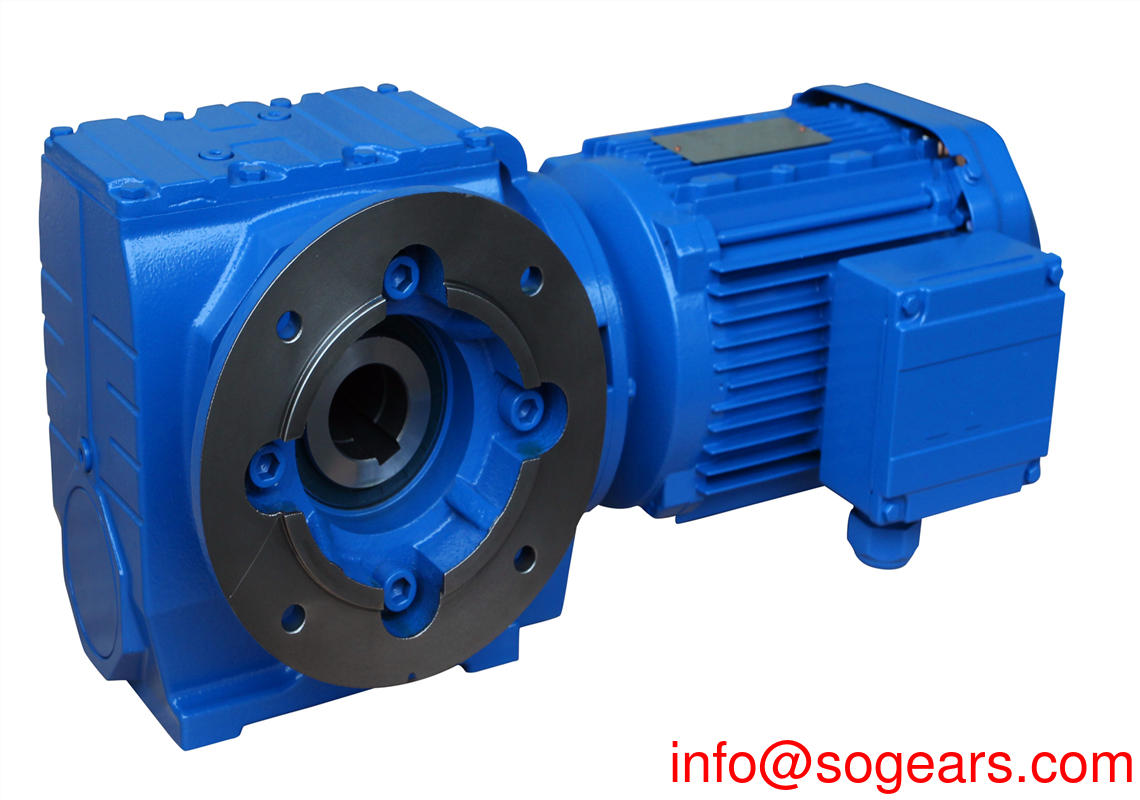
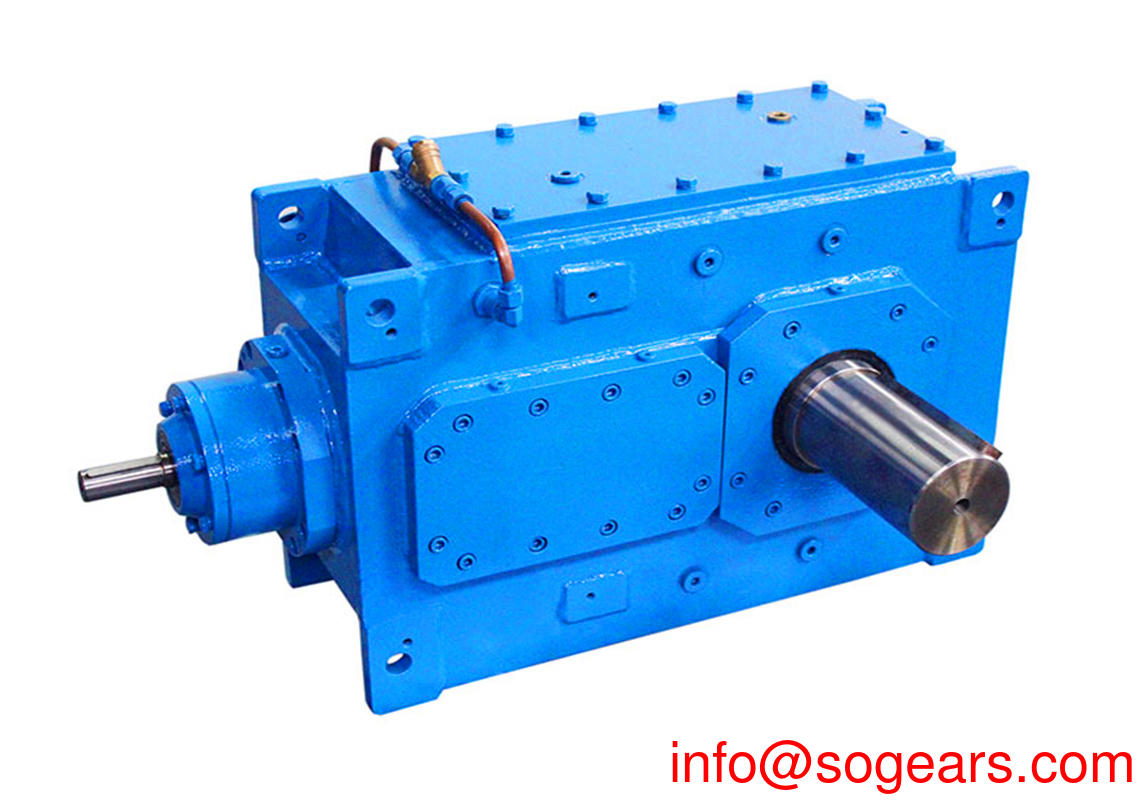
Kelajuan frekuensi pemboleh ubah QABP yang mengawal selia motor menyerap kelebihan produk dari negara maju seperti Jerman dan Jepun, dan menggunakan teknologi rekabentuk bantuan komputer untuk reka bentuk. Ia boleh dipadankan dengan jenis peranti penukaran kekerapan yang sama di rumah dan di luar negara, dengan penukaran dan fleksibiliti yang kuat. Motor itu menggunakan struktur tupai-sangkar, yang dipercayai beroperasi dan mudah dijaga. Motor ini dilengkapi dengan kipas paksi secara berasingan untuk memastikan bahawa motor mempunyai kesan penyejukan yang baik pada kelajuan yang berbeza. Penebat motor menggunakan struktur penebat F-kelas yang digunakan secara meluas di peringkat antarabangsa, yang meningkatkan kebolehpercayaan motor. Penunjuk yang sepadan dengan kuasa motor, saiz pemasangan kaki dan ketinggian pusat sepenuhnya konsisten dengan motor tanpa segerombolan QA. Siri motorsikal ini boleh digunakan secara meluas dalam industri seperti industri ringan, tekstil, industri kimia, metalurgi, alat mesin, dan lain-lain yang memerlukan alat berputar laju yang pantas, dan merupakan sumber kuasa ideal untuk pengawalan laju.
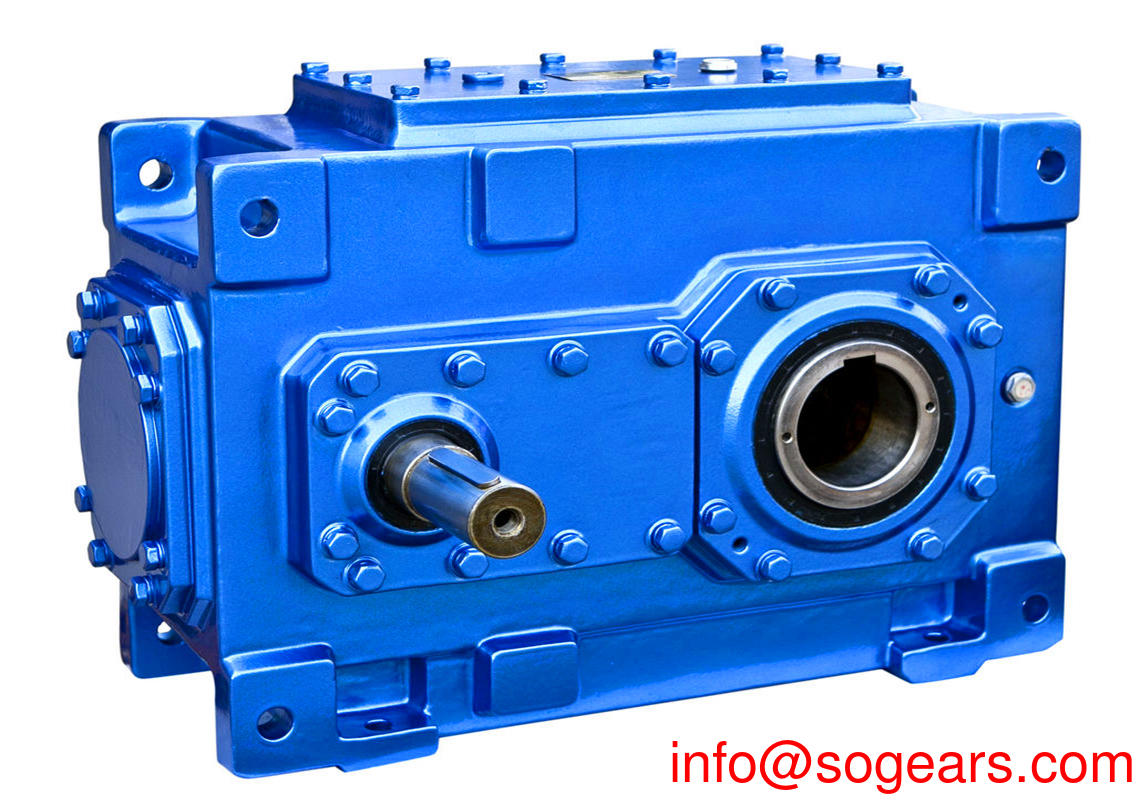
Kuasa rangkaian siri ini adalah dari 0.25 kW hingga 200 kW, dan ketinggian pusat bingkai adalah dari 71 mm hingga 315 mm.

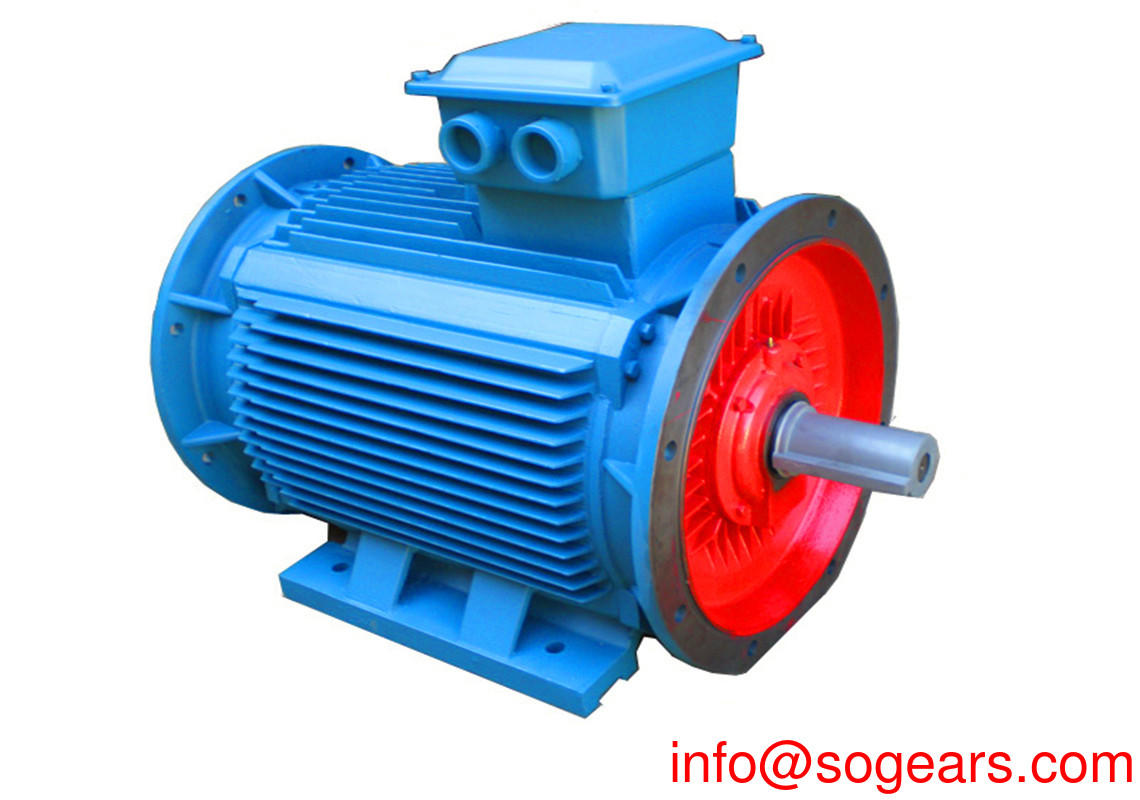
Motor penukaran kekerapan merujuk kepada motor yang berjalan secara berterusan pada 100% beban undian dalam julat 10% hingga 100% kelajuan undian di bawah keadaan persekitaran piawai, dan kenaikan suhu tidak akan melebihi nilai yang dibenarkan oleh motor.
Dengan perkembangan pesat teknologi elektronik kuasa dan peranti semikonduktor yang baru, teknologi pengawalan kelajuan AC telah terus bertambah baik dan bertambah baik, dan peningkatan inverter secara beransur-ansur telah digunakan secara meluas dalam motor AC dengan bentuk output keluaran yang baik dan prestasi kos yang sangat baik. Sebagai contoh: motor berskala besar dan motor roller sederhana dan kecil yang digunakan dalam kilang-kilang keluli, motor daya tarikan untuk kereta api dan transit kereta api bandar, motor lif, motor kren untuk peralatan mengangkat kontena, motor untuk pam dan peminat, pemampat, perkakas rumah Motors secara berturut-turut digunakan ac frekuensi pembolehubah AC yang berkuasa, dan telah mencapai keputusan yang baik [1]. Mengguna pakai kelajuan kekerapan ubah frekuensi AC yang mengawal motor mempunyai kelebihan yang ketara terhadap motor pengawalan kelajuan DC:
(1) Peraturan kelajuan mudah dan penjimatan tenaga.
(2) Motor AC mempunyai struktur mudah, saiz kecil, inersia kecil, kos rendah, penyelenggaraan mudah, dan ketahanan.
(3) Kapasiti boleh diperluaskan untuk mencapai operasi berkelajuan tinggi dan tinggi.
(4) Ia dapat menyedari permulaan lembut dan brek cepat.
(5) Tiada percikan api, letupan-bukti, penyesuaian alam sekitar yang kuat. [1]
Dalam tahun-tahun kebelakangan ini, penghantaran pengawalseliaan laju penukaran antarabangsa telah dibangunkan pada kadar pertumbuhan tahunan sebanyak 13% hingga 16%, dan secara beransur-ansur telah menggantikan transmisi kelajuan tinggi yang berkuasa DC. Kerana motor tanpa segerak biasa yang beroperasi dengan kekerapan malar dan bekalan kuasa voltan malar digunakan dalam sistem peraturan kelajuan frekuensi yang berubah-ubah, terdapat batasan yang besar. Motor inverter khas AC yang direka mengikut keperluan dan keperluan aplikasi telah dibangunkan di luar negara. Sebagai contoh, terdapat bunyi rendah, motor getaran rendah, motor dengan ciri-ciri tork berkelajuan rendah yang lebih baik, motor berkelajuan tinggi, motor dengan tachogenerators, dan motor kawalan vektor [1].
Prinsip pembinaan
Apabila kadar slip motor tidak segerak berubah sedikit, kelajuan adalah berkadar dengan kekerapan. Ia dapat dilihat bahawa mengubah kekerapan kuasa dapat mengubah kelajuan motor asynchronous. Dalam peraturan kelajuan penukaran kekerapan, selalu diharapkan fluks magnet utama tetap tidak berubah. Sekiranya fluks magnet utama lebih besar daripada fluks magnet semasa operasi normal, litar magnetnya terlalu tertutup untuk meningkatkan arus pengujaan dan mengurangkan faktor kuasa. Jika fluks magnet utama kurang daripada fluks magnet semasa operasi normal, tork motor dikurangkan [1].
Edit proses pembangunan
Sistem penukaran kekerapan motor semasa kebanyakan sistem kawalan V / F yang tetap. Ciri-ciri sistem kawalan penukaran frekuensi ini adalah struktur mudah dan pembuatan murah. Sistem ini digunakan secara meluas di tempat-tempat besar seperti peminat dan di mana keperluan prestasi dinamik sistem penukaran kekerapan tidak begitu tinggi. Sistem ini adalah sistem kawalan gelung terbuka biasa. Sistem ini dapat memenuhi keperluan transmisi licin kebanyakan motors, tetapi mempunyai prestasi pelarasan dinamik dan statik yang terhad, dan tidak boleh digunakan dalam aplikasi dengan keperluan yang ketat pada kinerja dinamik dan statik. tempatan. Untuk mencapai prestasi tinggi peraturan dinamik dan statik, kita hanya boleh menggunakan sistem kawalan gelung tertutup untuk mencapainya. Oleh itu, sesetengah penyelidik telah mencadangkan kaedah kawalan kelajuan motor yang mengawal kekerapan slip gelung tertutup. Kaedah kawalan kelajuan ini boleh mencapai prestasi tinggi dalam kawalan laju dinamik statik, tetapi sistem ini hanya boleh diperolehi di dalam motor dengan kelajuan yang lebih perlahan. Permohonan itu sepatutnya apabila kelajuan motornya tinggi, sistem ini bukan sahaja dapat mencapai tujuan menjimatkan kuasa, tetapi juga menyebabkan motor menghasilkan arus sementara yang besar, yang akan menyebabkan torsi motor berubah dengan serta-merta. Oleh itu, untuk mencapai prestasi dinamik dan statik yang lebih tinggi pada kelajuan yang lebih tinggi, kita mesti terlebih dahulu menyelesaikan masalah semasa transien yang dijana oleh motor. Hanya dengan menyelesaikan masalah ini dengan lebih baik, kita boleh membangunkan teknologi kawalan penjimatan frekuensi motor yang lebih baik. [2]
Ciri UtamaEdit
Motor penukaran frekuensi khas mempunyai ciri-ciri berikut:
Reka bentuk kenaikan suhu Kelas B, pembuatan F penebat kelas. Bahan penebat polimer yang tinggi dan tekanan pembuatan vakum dip cat proses pembuatan dan struktur penebat khas digunakan untuk membuat lilitan elektrik dengan penebat yang lebih tinggi menahan voltan dan kekuatan mekanikal yang lebih tinggi, yang mencukupi untuk operasi berkelajuan tinggi motor dan rintangan kepada arus frekuensi tinggi kejutan dan voltan penyongsang. Kerosakan kepada penebat.
Kualiti kira-kira adalah tinggi, dan tahap getaran adalah tahap R (tahap getaran dikurangkan). Bahagian mekanikal mempunyai ketepatan pemesinan yang tinggi, dan galas ketepatan tinggi khusus digunakan, yang boleh berjalan pada kelajuan tinggi.
Sistem pendinginan pengudaraan paksa, semua menggunakan kipas aliran paksi diimport ultra-tenang, kehidupan yang tinggi, angin yang kuat. Memastikan motor mendapat pelesapan haba yang berkesan pada sebarang kelajuan dan boleh mencapai operasi jangka panjang berkelajuan tinggi atau rendah.
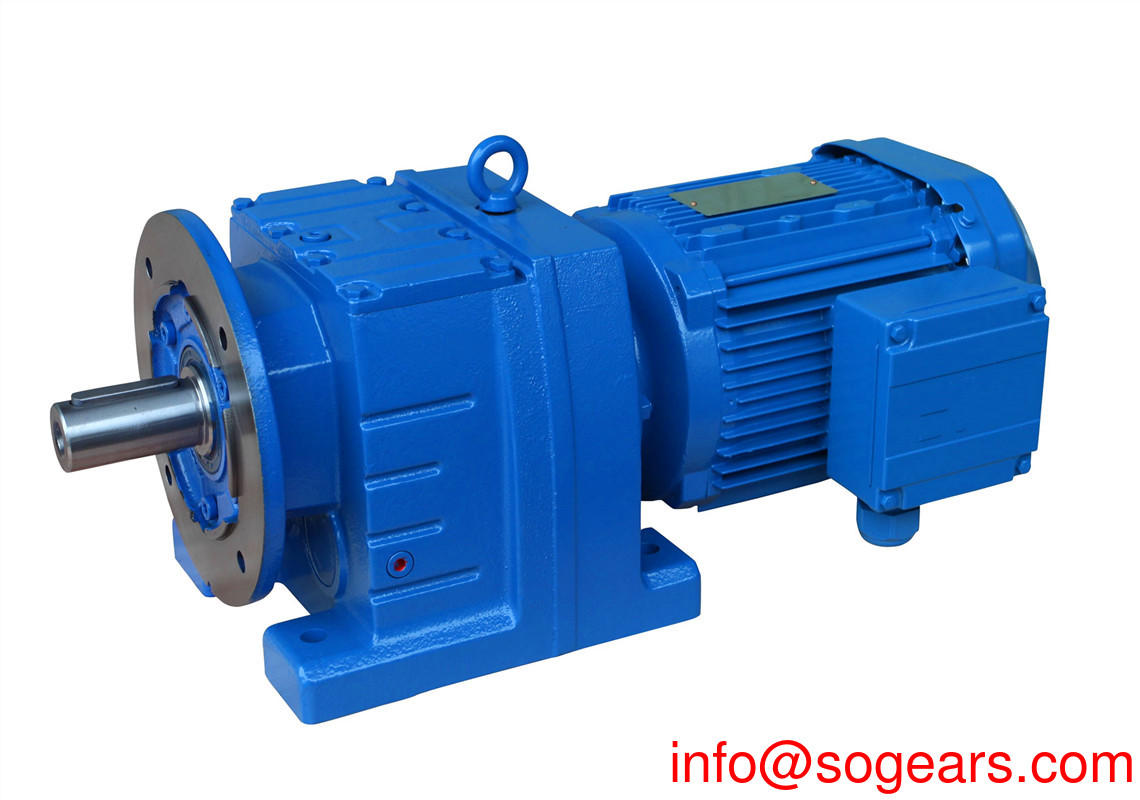
Berbanding dengan motor inverter tradisional, motosikal siri YP yang direka oleh perisian AMCAD mempunyai julat kelajuan yang lebih luas dan kualiti reka bentuk yang lebih tinggi. Reka bentuk medan magnet khas terus menekan medan magnet harmoni tinggi untuk memenuhi keperluan frekuensi yang luas, penjimatan tenaga dan indeks reka bentuk bunyi rendah. Dengan pelbagai ciri-ciri pengawalseliaan kelajuan tork dan kelajuan kuasa, kelajuannya stabil dan tiada riak tork.
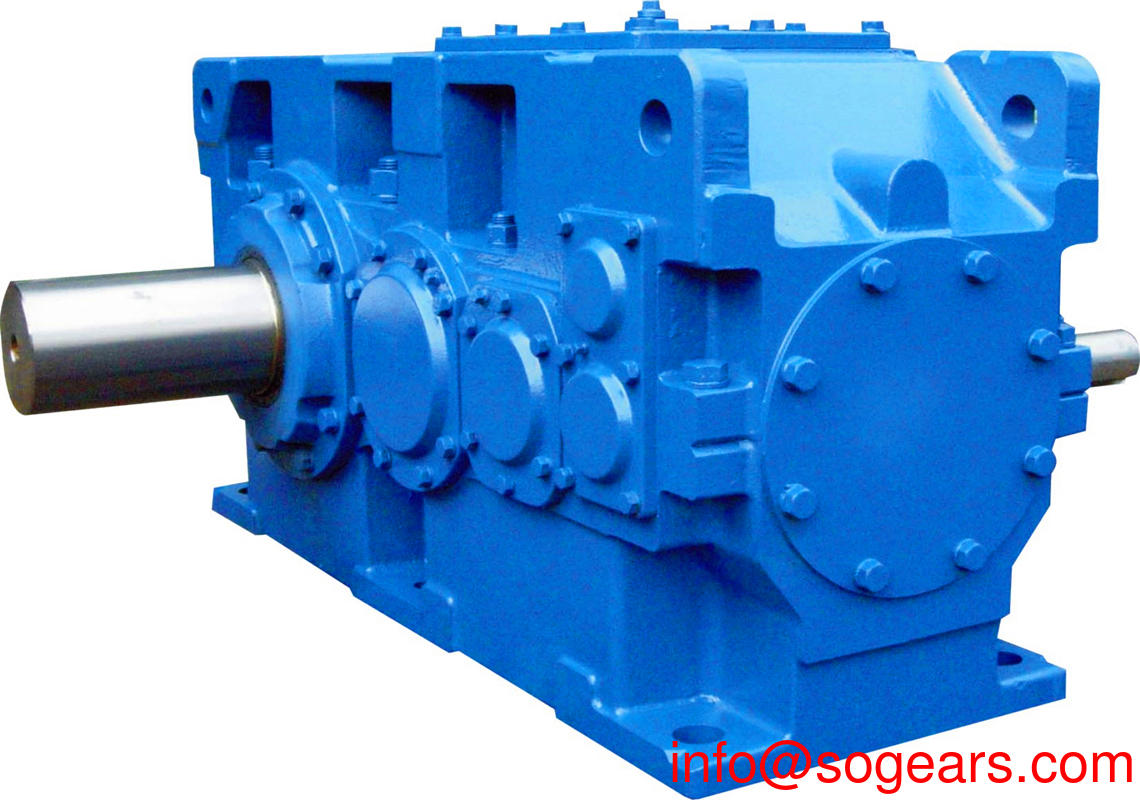
Ia mempunyai pemadanan parameter yang baik dengan pelbagai jenis inverter, dan dengan kawalan vektor, ia dapat mencapai tork penuh kelajuan tayar, tork besar frekuensi rendah dan kawalan kelajuan ketepatan tinggi, kawalan kedudukan dan kawalan respons dinamik yang cepat. Kawalan kekerapan siri YP motor khas boleh dilengkapi dengan brek dan encoder untuk menyediakan berhenti tepat, dan mencapai kawalan kelajuan ketepatan tinggi melalui kawalan laju gelung tertutup.
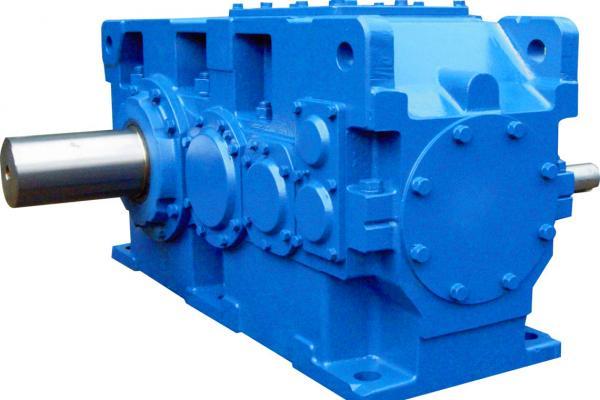
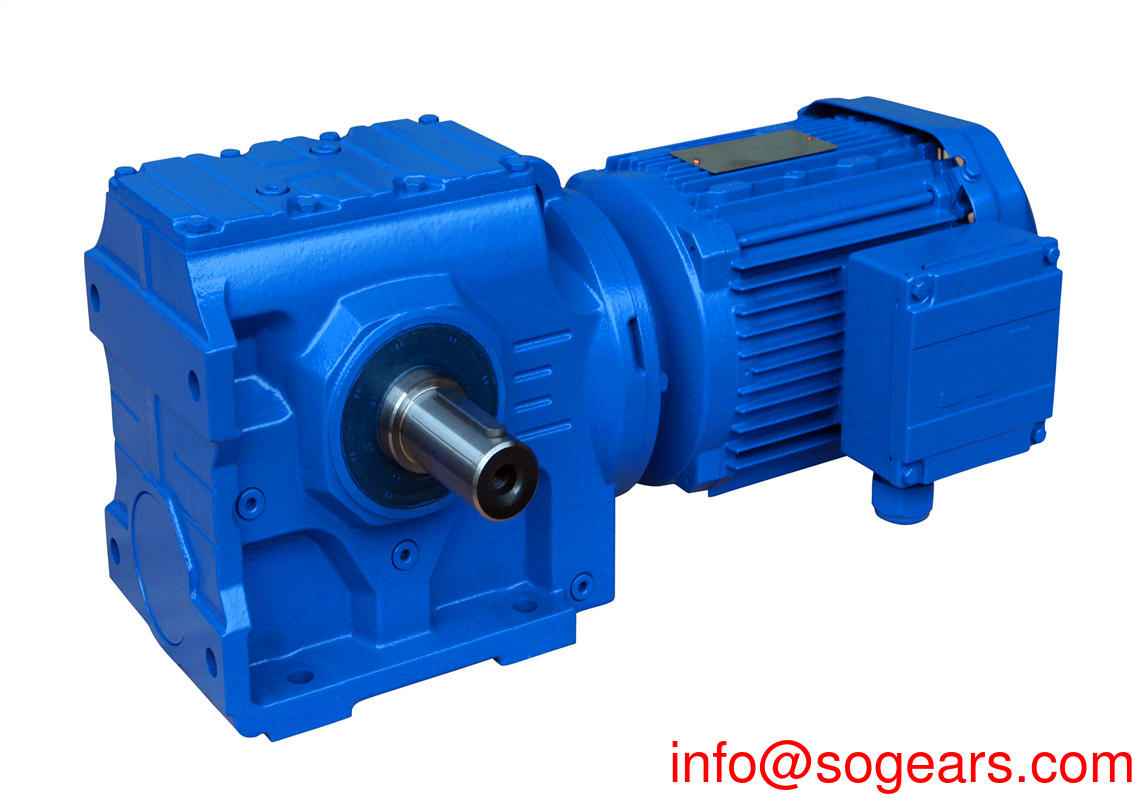
Mengguna pakai "reducer + penukaran frekuensi khusus motor + encoder + inverter" untuk mencapai kelajuan ultra kelajuan rendah kelajuan tepat kawalan. Motor tujuan khas siri YP mempunyai fleksibiliti yang baik, dan dimensi pemasangannya mematuhi piawaian IEC, dan ia boleh dipertukarkan dengan motor standard am.
Edit kerosakan penebat motor

Semasa promosi dan pemakaian AC frekuensi pembolehubah AC, terdapat sejumlah besar kerosakan awal kepada penebat motor frekuensi ubahsuaian AC. Banyak motor frekuensi berubah-ubah AC mempunyai hayat perkhidmatan hanya 1 hingga 2 tahun, dan beberapa hanya mempunyai beberapa minggu. Malah semasa operasi percubaan, penebat motor rosak, dan biasanya terjadi di antara giliran. Ini membawa masalah baru kepada teknologi penebat motor. Amalan telah membuktikan bahawa teori reka bentuk penebat motor di bawah voltan gelombang frekuensi gelombang elektrik yang dibangunkan dalam beberapa dekad yang lalu tidak boleh digunakan untuk motor frekuensi berkuasa frekuensi ubah frekuensi AC. Ia adalah perlu untuk mengkaji mekanisme kerosakan penebat motor inverter, menubuhkan teori asas reka bentuk penebat motor inverter AC, dan merumuskan piawaian perindustrian bagi motor inverter AC.
1 Kerosakan kepada wayar elektromagnet
1.1 Pelepasan separa dan caj ruang
Pada masa ini, motor frekuensi yang dikawal kelajuan frekuensi berkendali dikawal oleh teknologi IGB T (Pintu Terhad Diode) PWM (modul lebar pulangan lebar lebar). Julat dayanya adalah sekitar 0.75 hingga 500kW. Teknologi IGBT boleh menyediakan arus dengan masa naik yang sangat singkat. Masa kenaikannya ialah 20 ~ 100μs, dan nadi elektrik yang dihasilkan mempunyai frekuensi yang sangat tinggi, mencapai 20kHz. Apabila voltan yang semakin meningkat dari penyongsang ke hujung motor, disebabkan ketidakpadanan impedans antara motor dan kabel, gelombang voltan yang dicerminkan dihasilkan. Ini memantulkan gelombang kembali kepada penukar frekuensi, dan kemudian menginduksi satu lagi gelombang yang dipantulkan disebabkan oleh ketidakpadanan impedans antara kabel dan penukar frekuensi, yang ditambah kepada gelombang voltan asal, dengan itu menghasilkan voltan spek pada pinggir hadapan gelombang voltan . Besarnya voltan spek bergantung pada masa naik voltan nadi dan panjang kabel [1].
Secara umumnya, apabila panjang dawai meningkat, overvoltage terjadi pada kedua-dua hujung dawai. Amplitud overvoltage di hujung motor meningkat dengan panjang kabel dan cenderung jenuh. . Ujian menunjukkan bahawa overvoltage berlaku pada pinggir yang semakin meningkat dan jatuh dari voltan, dan ayunan pengecilan berlaku. Pelemahan mematuhi undang-undang eksponen, dan tempoh ayunan meningkat dengan panjang kabel. Terdapat dua jenis frekuensi untuk PWM memandu gelombang denyutan. Satu ialah kekerapan menukar. Kekerapan pengulangan voltan spektrum berkadar terus dengan kekerapan pensuisan. Yang lain adalah frekuensi asas, yang secara langsung mengawal kelajuan motor. Pada permulaan setiap frekuensi asas, polaritas nadi berubah daripada positif ke negatif atau dari negatif ke positif. Pada masa ini, penebat motor tertakluk kepada voltan berskala penuh yang dua kali nilai voltan puncak. Di samping itu, dalam motor tiga fasa dengan lilitan tertanam, polariti voltan di antara dua lilitan fasa berlainan yang berbeza mungkin berbeza, dan lompang voltan penuh boleh mencapai dua kali nilai voltan puncak. Menurut ujian, output gelombang voltan oleh penyongsang PWM dalam sistem AC 380 / 480V mempunyai nilai voltan puncak diukur dari 1.2 hingga 1.5kV di hujung motor, dan dalam sistem AC 576 / 600V, voltan voltan yang diukur nilai voltan puncak mencapai 1.6 hingga 1.8 kV. Adalah sangat jelas bahawa di bawah voltan berskala penuh ini, pelepasan separa permukaan berlaku di antara lilitan penggulungan. Oleh kerana pengionan, caj ruang akan dijana dalam jurang udara, dan medan elektrik yang diinduksi bertentangan dengan medan elektrik yang digunakan akan dibentuk. Apabila perubahan polariti voltan, medan elektrik terbalik ini berada dalam arah yang sama seperti medan elektrik yang digunakan. Dengan cara ini, medan elektrik yang lebih tinggi dijana, yang akan menyebabkan peningkatan jumlah pelepasan separa dan akhirnya menyebabkan kerosakan. Ujian telah menunjukkan bahawa magnitud kejutan elektrik yang bertindak pada penebat putaran ini bergantung kepada sifat khusus konduktor dan masa kenaikan arus memandu PWM. Sekiranya masa kenaikan adalah kurang daripada 0.1 μs, 80% potensi akan ditambah kepada dua pusingan pertama penggulungan, iaitu, semakin singkat masa kenaikan, semakin besar kejutan elektrik, dan jangka masa yang lebih singkat - penebat [1].
1.2 Kehilangan pemanasan dielektrik
Apabila E melebihi nilai kritikal penebat, kehilangan dielektriknya meningkat dengan pesat. Apabila kekerapan meningkat, pelepasan separa akan meningkat dengan sewajarnya, dan akibatnya, haba akan dijana, yang akan menyebabkan kebocoran arus yang lebih besar, yang akan menyebabkan Ni meningkat lebih cepat, iaitu kenaikan suhu motor akan meningkat, dan penebat akan lebih laju. Pendek kata, dalam frekuensi frekuensi motor, ia adalah disebabkan oleh kesan gabungan dari pelepasan separa yang dinyatakan di atas, pemanasan dielektrik, induksi cas ruang dan faktor-faktor lain yang menyebabkan kerosakan pramatang dawai elektromagnetik [1].
2 Kerosakan kepada penebat utama, penebat fasa dan cat penebat
Seperti yang dinyatakan sebelum ini, penggunaan bekalan kuasa kekerapan pembolehubah PWM meningkatkan amplitud voltan berayun di terminal frekuensi pembolehubah motor. Oleh itu, penebat utama, penebat fasa dan cat penebat motor menahan kekuatan medan elektrik yang lebih tinggi. Mengikut ujian, disebabkan kesan gabungan faktor-faktor seperti masa kenaikan voltan, panjang kabel, dan kekerapan penukaran terminal output penyongsang, voltan puncak terminal di atas boleh melebihi 3kV. Di samping itu, apabila pelepasan separa berlaku di antara lilitan lilitan motor, tenaga elektrik yang tersimpan dalam kapasitaan yang diagihkan dalam penebat akan menjadi haba, radiasi, tenaga mekanikal dan kimia, yang akan merendahkan keseluruhan sistem penebat dan mengurangkan voltan kerosakan daripada penebat, akhirnya membawa kepada Sistem penebat telah dipecah [1].
3 Penuaan penebat yang dipercepatkan disebabkan tekanan alternating kitaran
Ia mengguna pakai bekalan kuasa penukaran kekerapan PWM, supaya motor penukaran kekerapan boleh bermula pada frekuensi yang sangat rendah, voltan rendah dan tiada arus masuk, dan boleh menggunakan pelbagai kaedah yang disediakan oleh penukar frekuensi untuk melakukan brek cepat. Kerana motor kekerapan pembolehubah boleh mencapai permulaan dan brek yang kerap, penebat motor sering di bawah tekanan tegangan selang kitaran, dan penebat motor dipercepatkan untuk umur [1].
Masalah gegaran yang disebabkan oleh daya pengujaan elektromagnetik dan penghantaran mekanikal dalam motor asynchronous biasa menjadi lebih rumit dalam motor frekuensi pembolehubah. Pelbagai harmonik masa yang terkandung dalam pembolehubah frekuensi pembolehubah mengganggu harmonik spatial yang wujud dalam bahagian elektromagnetik untuk membentuk pelbagai daya pengujaan elektromagnetik. Pada masa yang sama, kerana motor mempunyai julat frekuensi operasi yang luas dan perubahan kelajuan yang besar, resonans berlaku apabila ia konsisten dengan kekerapan semula jadi bahagian mekanikal. Di bawah pengaruh daya pengujaan elektromagnetik dan getaran mekanikal, penebat motor tertakluk kepada tekanan alternating cyclic yang lebih kerap, yang mempercepat penuaan penebat motor.









































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}